Lüftersteuerung mit OBD1-Diagnose Opel Manta B / Motronic 1.5.1
Eine kombinierte temperaturabhängige Lüftersteuerung und Bosch-Motronic-Blinkcode-Diagnose, gebaut um einen Arduino Pro Mini, eine 3-stellige 7-Segment-Anzeige und einen Drehgeber. Eingebaut in eine 3D-gedruckte Blende im Manta-B-Stil.
Hardware
Arduino Pro Mini 5 V / 16 MHz · 3-stellige 7-Segment (Common Cathode) · Rotary Encoder PEC16 · NTC im Spannungsteiler · 2 × Relais SRD-05VDC-SL-C · Optokoppler 4N25 · DC/DC-Wandler 5 VSoftware
Lüfter-Automatik mit Schwelle & Nachlauf · manueller Override · Schwellwert-Edit · Helligkeit 5–100 % · Diagnose mit Auto-Kalibrierung · Sitzungs-Historie als Ringpuffer (32 × 10 Codes)Diagnose
Liest Bosch-Motronic 1.5/1.5.1 Blinkcodes über die Diagnoseleitung (massegeschaltet, aktiv LOW). Decodiert auto-kalibriert anhand 3 × Code 12. Speichert pro Sitzung bis zu 10 Codes, löscht den ECU-Speicher.Schaltplan auf einen Blick
Bedienung
Quelle: Anleitung/Lüftersteuerung Endnutzeranleitung.odt
Automatikbetrieb
Lüfter schaltet automatisch ein, sobald die Temperatur die eingestellte Schalttemperatur überschreitet. Beim Unterschreiten läuft er noch 5 s nach.Dauer EIN (manueller Override)
- Aktivieren: Drehknopf kurz drücken (< 0,5 s). Display blinkt sehr schnell.
- Beenden: erneut kurz drücken oder Temperatur sinkt unter Schwelle oder Nachlaufzeit nach Zündung-AUS abgelaufen.
Schalttemperatur einstellen
- Drehknopf länger als 1 s halten → Wert blinkt schnell.
- Drehen stellt zwischen 25 °C und 130 °C ein. Nach 5 s ohne Drehung wird gespeichert.
Helligkeit einstellen
- Aktivieren: bei eingeschalteter Zündung doppelt klicken.
- Drehen ändert in 5-%-Schritten zwischen 5 % und 100 %.
- Kurzer Klick bestätigt & speichert. Nach 5 s ohne Drehung wird automatisch gespeichert.
Steuergerät auslesen (Diagnose)
- Aktivieren: Zündung EIN, Drehknopf länger als 10 s drücken.
- Lauflicht zeigt Beginn der Auto-Kalibrierung (3 × Code 12 als Referenz).
- Danach werden die gespeicherten Fehlercodes auf der Anzeige rotierend angezeigt.
- Nach erneutem 3 × Code 12 → Display zeigt CLR, die Codes werden in der ECU gelöscht.
- Die Sitzung wird automatisch als P1 in die Historie geschrieben.
Fehlercode-Historie
- Aktivieren: Zündung AUS, Drehknopf länger als 5 s drücken.
- Display zeigt 3 s den Speicherplatz (P1, P2, …), dann die enthaltenen Codes rotierend.
- Drehen wechselt zur nächsten/vorherigen Sitzung (6 Encoder-Schritte = 1 Sitzungssprung).
- Beenden: Drehknopf kurz drücken.
Hardware
Pinbelegung Arduino Pro Mini
| Pin | Funktion | Beschaltung |
|---|---|---|
| D11 | Segment A | Common-Cathode 7-Segment, HIGH = AN |
| D9 | Segment B | |
| D8 | Segment C | |
| D7 | Segment D | |
| D6 | Segment E | |
| D5 | Segment F | |
| D4 | Segment G | |
| D12 | Digit 1 (Hunderter, links) | NPN-Treiber, HIGH = EIN |
| D13 | Digit 2 (Zehner, mitte) | NPN-Treiber, HIGH = EIN |
| D0 ⚠ | Digit 3 (Einer, rechts) | NPN-Treiber. Konflikt mit RX beim Upload abklemmen |
| D2 | Encoder CLK | INPUT_PULLUP |
| D3 | Encoder DT | INPUT_PULLUP |
| D1 | Encoder SW (Taster) | INPUT_PULLUP |
| A6 | „Tür offen" / Anzeige erzwingen | analog, aktiv LOW, externer 10 kΩ Pullup |
| A7 | Zündung I1 | analog, aktiv LOW via Optokoppler 4N25, ext. 10 kΩ Pullup |
| A3 | Diagnose-Signal Motronic | digital, aktiv LOW, INPUT_PULLUP |
| A2 | Diagnose-Umschaltrelais | Transistor BC337 + Freilaufdiode 1N4007 |
| A0 | Lüfter-Relais | Transistor BC337 + Freilaufdiode 1N4007 |
| A1 | NTC Temperaturfühler | Spannungsteiler mit Vorwiderstand |
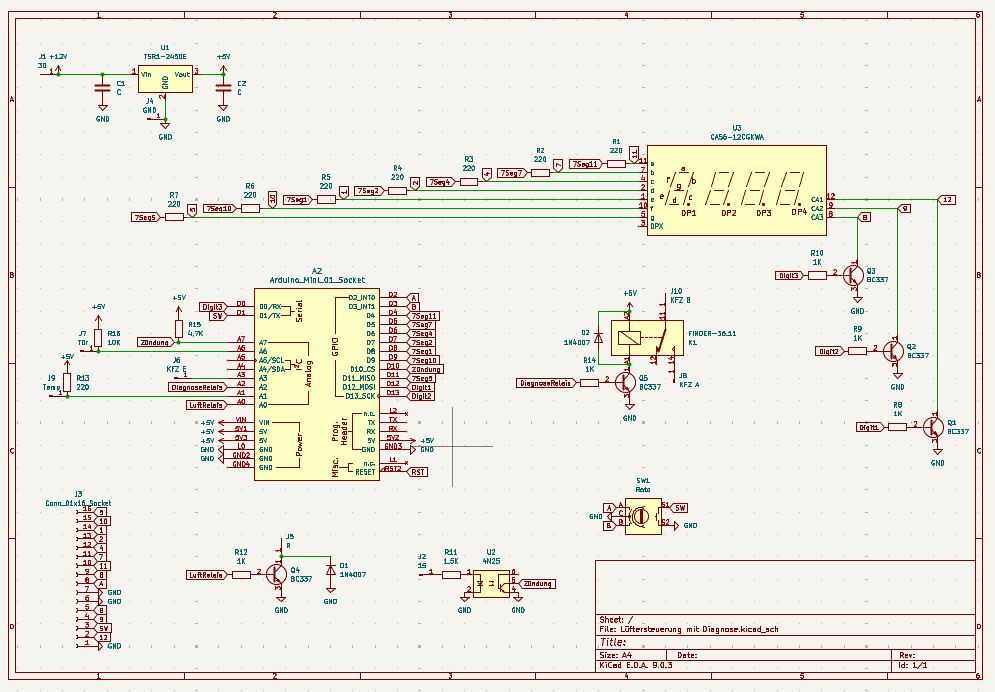
Schaltplan
Bauteilliste
| Bauteil | Typ | Datenblatt (lokal) |
|---|---|---|
| Mikrocontroller | Arduino Pro Mini 5 V / 16 MHz (ATmega328P) | Pro Mini PDF |
| Spannungsversorgung | DC/DC-Wandler 12 → 5 V | DC/DC PDF |
| Diode (Freilauf) | 1N4007 | 1N4007 PDF |
| Drehgeber | Bourns PEC16-4220F-S0024 (24 Detents, mit Taster) | PEC16 PDF |
| KFZ-Stecker | 6,3 mm Flachstecker | Stecker PDF |
| Kondensator | Keramik 100 nF | 100 nF PDF |
| Optokoppler | 4N25 | 4N25 PDF |
| Pinheader | Standard-2,54-mm | Bild |
| Relais | Songle SRD-05VDC-SL-C, 5 V Spule, 10 A Kontakt | SRD PDF |
| Transistor | BC337 NPN, 800 mA, TO-92 | BC337 PDF |
| 7-Segment-Anzeige | 0,36" 11 Pin, 3 Ziffern, gemeinsame Anode (gelb) | Bild |
{kind=link}
{kind=link}
Hinweis zur Anzeige: Das Datenblatt nennt „gemeinsame Anode", die Firmware behandelt die Anzeige aber als Common-Cathode (HIGH = AN). Bitte real verifizieren — das ist die häufigste Fehlerquelle bei diesem Projekt.
3D-Modell & Gehäuse
Im Ordner 3D Druck/ liegen STL-Dateien für die Manta-B-Temperaturanzeige-Blende, Drehknopf, Klammer und Gehäusedeckel/-boden. Final-Versionen:
Manta B Temperaturanzeige Blende V3.stl– FrontblendeManta B Temperaturanzeige Drehknopf Opel.stl– DrehknopfManta B Temperaturanzeige Gehäuse Deckel V2.stl+Boden V2.stl– GehäuseManta B Temperaturanzeige Klammer mit Platine.stl– Halterung
Platine & Schaltplan
Direktansicht der KiCad-Dateien (Schaltplan + Original-PCB + Lochraster-Edition) und ein interaktiver Bestückungsplan für die Lochraster-Edition.
Schaltplan (KiCad)
Pan = Ziehen mit der Maus · Zoom = Mausrad · Doppelklick = anfitten · Pin/Net-Hover für Details.
Original-PCB (66 × 46 mm)
Die ursprünglich entworfene Leiterplatte. Hinweis sie hat 8 Pad-Konflikte (Bauteile teilen Bohrlöcher), die in der Lochraster-Edition behoben sind.
Lochraster-Edition (60,96 × 45,72 mm)
Konfliktfreie Anordnung auf 25 × 19 = 475 Löchern, alle Pins exakt auf 2,54-mm-Raster (außer K1 Pin 11 / COM, herstellerseitig off-grid). Kein Kupfer-Routing — die Verdrahtung erfolgt manuell mit Litze auf der Lötseite (71 Drahtbrücken).
Lochraster-Bestückungsplan (interaktiv)
25 × 19 = 475 Löcher, 2,54 mm Raster. Hover über einen Pin zeigt Bauteil + Net + alle verbundenen Pins. Wähle ein Net, um es zu markieren — die Drahtbrücken werden als Linien angezeigt.
IST vs. Verbesserung — was wurde geändert?
Original-PCB
Lochraster-Edition
Korrigierte Bauteilpositionen
| Ref | Original-Position | Lochraster-Position | Grund |
|---|---|---|---|
| Q3 | col 3 rows 4–6 | col 4 rows 4–6 | Pin-Überlappung mit Q1 (gleiche Spalte) |
| C1 | (16,1)–(16,3) | (10,1)–(10,3) | Pin 1 lag auf U1.3 (anderes Net) |
| C2 | (10,1)–(10,3) | (14,1)–(14,3) | Platz für umgesetztes C1 |
| U1 | cols 14,15,16 row 1 | cols 11,12,13 row 1 | Platz für umgesetztes K1 |
| K1 | cols 17–22, rows 1+6 | cols 15–20, rows 1+6 | Pin 14 lag auf J8.2 (anderes Net) |
| D1 | cols 17–21 row 13 | cols 17–21 row 16 | Pin 1 lag auf J2.3 |
| Q4 | cols 19–21 row 15 | cols 19–21 row 14 | Pin 1 lag auf J5.3 |
| R14 | (15,10)–(15,14) | (12,11)–(16,11) | Pin 2 lag auf U2.4 (GND) |
Eingesparter Platz
Die Lochraster-Edition spart 301 mm² (10 %) gegenüber der Original-PCB. Mehr ist nicht möglich, weil zwei Bauteile die Mindestgröße bestimmen:
- J3 (1 × 16 Pin-Header zum Front-Panel) → mindestens 16 Reihen oder Spalten
- 9 × 1 × 3 KFZ-Stecker auf der rechten Kante, gestapelt im 2-Reihen-Pitch → mindestens 18 Reihen Höhe
Eine echte SMD-Variante würde anders aussehen — aber der Wunsch war: nur THT, identische Footprints.
Fehlercodes
Die Fehlercode-Tabelle ist jetzt im Emulatoren → Fehlercodes-Tab.
Firmware-Architektur
Modus-State-Machine
Reihenfolge der Anzeigepriorität (höchste zuerst): History → Diagnose → Setting (Schwelle/Helligkeit) → Normalbetrieb.
EEPROM-Layout (optimierte Firmware v2)
Der Wear-Leveling-Mechanismus wählt beim Lesen den Slot mit der höchsten Sequenznummer, schreibt beim Speichern in den nächsten freien Slot mit Sequenznummer+1. Das verteilt 100 000 EEPROM-Schreibzyklen auf 8 Slots → effektiv 800 000 Schreibvorgänge.
PID-Lüfterregelung (v2)
Statt der ursprünglichen Bang-Bang-Steuerung („Temperatur > Schwelle ⇒ Relais EIN, sonst AUS plus 5 s Nachlauf") regelt v2 die Lüfterleistung als kontinuierliche Stellgröße 0–100 % mit einem PID-Regler und gibt sie über Slow-PWM (Default 30 s Periode) auf das Relais aus.
error = T - Sollwert (>0 ⇒ zu heiß)
P = Kp · error
I += Ki · error · dt (Conditional-Integration
gegen Wind-up,
eingefroren in Deadband)
D = Kd · dT/dt (Derivative on
Measurement, kein
Setpoint-Kick)
output = clip(P + I + D, 0, 100) %
elapsed = (now - cycleStart) % CFG_PID_PWM_MS on_ms = output% · CFG_PID_PWM_MS / 100 relay = (elapsed < on_ms)
Override (kurzer Klick) zwingt die Duty unbedingt auf 100 %.
Default-Tuning: Kp = 5 %/°C · Ki = 0.5 %/(°C·s) · Kd = 2 %·s/°C · Slow-PWM = 30 s · Deadband = 0.5 °C.
⚠ Hardware-Konsequenz: Das verbaute SRD-05VDC-SL-C ist ein mechanisches Relais mit ca. 100 000 Schaltzyklen. Slow-PWM mit 30 s Periode ergibt im ungünstigsten Fall 120 Zyklen/Stunde → ~830 h Nutzungsdauer. Für Dauerbetrieb sollte das Relais durch einen Logik-Pegel-N-MOSFET (z. B. IRLZ44N) oder ein SSR ersetzt werden. Die Pinbelegung bleibt identisch.
Notfall-Rückfallebene: Mit #define CFG_USE_PID 0 in der Firmware wird wieder die klassische Bang-Bang-Logik aktiv – falls man auf der Strecke vorerst auf Nummer sicher gehen will.
Diagnose-Decoder (Auto-Kalibrierung)
Das Bosch-Motronic-Steuergerät sendet Codes als zweistellige Blink-Sequenzen, getrennt durch lange Pausen. Beispiel Code 12: 1 Blitz → kurze Pause → 2 Blitze → lange Pause → nächster Code.
Beim Diagnose-Start sendet das Steuergerät 3 × Code 12 als Startcode. Die Firmware misst dabei automatisch die Pausenzeiten und leitet daraus die Schwelle „kurze vs. lange Pause" ab. So funktioniert die Erkennung auch dann zuverlässig, wenn ein Steuergerät mit leicht abweichendem Timing arbeitet.
Quellcode-Übersicht
readEncoderAndButtons() | Encoder + Klick + Long-Press / Double-Click |
handleMirrorMode() | Übergang in den Diagnose-Modus |
processDiagnosisSignal() | Decoder-State-Machine (Pulse → Code) |
updateRelay() | Lüfter-Logik (Auto / Override / Nachlauf) |
updateDisplay() | Modus-Priorität, ruft Display-Helfer auf |
saveSessionToEEPROM() / loadSessionByRelativeIndex() | Ringpuffer für Sitzungen |
Optimierungsplan
Klicke eine Karte an, um sie als nächste Verbesserung vorzumerken. Auswahl wird lokal gespeichert.
Software vollständig umgesetzt
erledigt Korrekte Temperatur statt linearer Approximation.
erledigt Kein
delay(1000) mehr im Loop.erledigt Schwelle aus Kalibrier-Messung statt fester 2000 ms.
erledigt Ein Klick = ein Schritt.
erledigt 5 ms-Filter, saubere Edge-Events.
update()erledigt Lebensdauer × 8.
micros()erledigt Loop läuft ohne
delay() durch.erledigt Selbstheilung bei Hängern.
erledigt Klare Übergänge.
erledigt RAM-frei.
Hardware
Platinen-Revision Digit3 auf D10 verlegen → Upload + Serial-Debug ohne Aufschrauben.
Platinen-Revision Common-Cathode-Enable über Timer2-PWM.
empfohlen Schützt MCU vor 14 V-Spikes auf der Diagnose-Leitung.
empfohlen P-MOSFET High-Side oder Schottky + PTC.
empfohlen Schützt EEPROM bei Spannungseinbrüchen.
empfohlen An VCC-Pins der ICs.
UX
Bei 1 s / 5 s / 10 s je ein anderes Indikator-Muster.
Dezimalpunkt am Einer-Digit als Indikator.
Über LDR oder Klemme 58 (Standlicht).
Schnelles Drehen → 5 °C / Klick.
15 s halten ohne Zündung → EEPROM-Reset.
Beim Power-On „888" + Software-Version.
Emulatoren
Parameter-Fit aus Echtmessung (Stoppuhr + Display)
Fehlercode-Simulation
Anleitung
- Knopf kurz klicken → Override toggeln (nur das Relais; Anzeige bleibt)
- Knopf halten ≥ 1 s (mit Zündung) → Schwellwert-Edit, danach drehen, kurzer Klick speichert
- Knopf doppelt klicken (mit Zündung) → Helligkeit-Edit
- Knopf halten ≥ 10 s (mit Zündung) → Diagnose mit den oben eingegebenen Codes
- Knopf halten ≥ 5 s (ohne Zündung) → History
- Im History-Modus 6 × drehen = nächste Sitzung
- Bei „Tür offen" + Zündung AUS bleibt die Anzeige weiterhin sichtbar (Firmware-Spezifikation)
Live-Log
| Code | Bedeutung | Bedingung / Ursache | Ersatzwert / Datenliste |
|---|
Generierter C-Code
Klicke „C-Code generieren"
Log
Log
3D-Modell – Interaktiver STL-Viewer
Alle druckbaren Teile und das PCB-Modell in einer interaktiven 3D-Vorschau. Bedienung: Mausziehen = drehen · Mausrad = zoomen · Rechtsklick + Ziehen = verschieben · Doppelklick = Kamera zentrieren.
–
PCB-Modell (KiCad STEP)
Das Lüftersteuerung mit Diagnose.step enthält das exakte Platinen-Modell aus KiCad inkl. Bauteilen (DC/DC, Pro Mini, Optokoppler, Relais, Anzeige).
Three.js kann STEP nicht nativ rendern (das Format ist eine NURBS-/B-Rep-Beschreibung, nicht polygonal). Drei Wege, sich's anzusehen:
- STEP-Viewer im Browser: öffne die Datei direkt in 3dviewer.net oder viewstl.com per Drag & Drop.
- Lokale Software: FreeCAD, KiCad selbst (View → 3D Viewer) oder eDrawings.
- Konvertieren zu STL: in FreeCAD öffnen → File → Export → STL → in den Ordner
3D Druck/legen → erscheint dann oben im Dropdown (manuell als Option ergänzen).
Anmerkungen & Verbesserungen
Diese Seite sammelt Korrekturen zu meinen früheren Aussagen, technische Hintergründe und konkrete Verbesserungsvorschläge mit High-Level-Umsetzung. Schwerpunkt aktuell: Lüfteransteuerung nach dem Umbau auf PID.
0. Schaltsparender PID-Regler (D-dominant + Hysterese)
Statt eines Slow-PWM-Aktuators auf dem Relais regelt v2 jetzt mit einem Hysterese-Aktuator, der zusätzlich auf Mindest-Verweilzeiten in jedem Zustand achtet. Der Trick liegt im PID-Tuning: Kd ist hoch, Kp und Ki sind klein.
Warum D-dominant?
Bei der Motorkühlung haben wir's mit einem thermisch sehr trägen System zu tun:
- Eine reine P-Regelung reagiert nur, wenn der Sollwert schon überschritten ist. Bis dann der Lüfter-Effekt greift, ist die Temperatur weiter gestiegen → Überschwingen.
- Der I-Anteil mittelt zwar Drift heraus, treibt aber bei Sollwert-Sprüngen ins Wind-up. Bei einem Bang-Bang-/Hysterese-Aktuator ist der I-Anteil eher schädlich (Sättigung).
- Der D-Anteil reagiert auf dT/dt – also wie schnell sich die Temperatur ändert. Wenn der Motor heizt und die Temperatur steigt, schiebt der D-Anteil den Output schon hoch, bevor das Setpoint erreicht ist. Sobald der Lüfter greift und die Temperatur fällt, kippt D ins Negative und drückt den Output unter die AUS-Schwelle – Lüfter aus, lange bevor die Temperatur wieder unter Sollwert ist.
Resultat: lange An-Phasen, lange Aus-Phasen, sehr wenige Schaltvorgänge.
Default-Tuning (Firmware v2)
| Parameter | Vorher (Slow-PWM) | Jetzt (Hysterese) | Begründung |
|---|---|---|---|
| Kp | 5.0 %/°C | 2.0 %/°C | Kein heftiger Sprung-Beitrag, der zu Flatterschalten führt |
| Ki | 0.5 %/(°C·s) | 0.05 %/(°C·s) | Nur leichte Drift-Korrektur, kein Wind-up-Risiko |
| Kd ★ | 2.0 %·s/°C | 15.0 %·s/°C | ★ Antizipiert Temperaturänderung 5–10 s im Voraus |
| D-Filter (EMA α) | — | 0.15 | Tiefpass auf dT/dt gegen ADC-Rauschen |
| EIN-Schwelle | — | 60 % Output | Klares „jetzt einschalten"-Signal |
| AUS-Schwelle | — | 30 % Output | 30 % Hysterese-Band |
| Min-EIN-Zeit | — | 30 s | Verhindert kurze Pulse |
| Min-AUS-Zeit | — | 60 s | Erzwingt lange Ruhezyklen |
| Schaltrate (Worst Case) | ~120/h | ~30/h | Faktor 4× weniger Verschleiß |
Hysterese-Logik (Pseudocode)
output = PID(error, dt) // mit Kp=2, Ki=0.05, Kd=15, EMA-D-Filter
if (relais ist EIN) {
// nur ausschalten, wenn Mindestzeit-EIN abgelaufen UND Output unter AUS-Schwelle
if (now - lastSwitch >= MIN_ON_MS && output < OFF_THRESH) {
relais = AUS; lastSwitch = now;
}
} else {
// nur einschalten, wenn Mindestzeit-AUS abgelaufen UND Output über EIN-Schwelle
if (now - lastSwitch >= MIN_OFF_MS && output > ON_THRESH) {
relais = EIN; lastSwitch = now;
}
}Im Emulator selbst durchspielen
Im UI-Tab unter „PID-Regler-Parameter" auf D-dominant ★ klicken und im Live-Dashboard auf den Schaltzyklen-Counter und die / h-Rate schauen. Vergleichend auf Klassisch (Kp-dominant) stellen → der Counter klettert dramatisch schneller. Auf Sehr schaltsparend für noch weniger Schaltungen (mit etwas mehr Temperatur-Hub).
1. Korrektur: Lebensdauer-Aussage zum Relais
1. Korrektur: Lebensdauer-Aussage zum Relais
Was korrekter ist: Diese Zahl gilt nur für das aktuell verbaute SRD-05VDC-SL-C — ein 5 V-PCB-Relais aus dem Hobby-Bereich. Ein echtes KFZ-Mini-ISO-Relais (Bosch / Hella, 30–40 A) hat 2–5× höhere Schaltzyklenzahlen. Die Frage „realistisch für ein KFZ-Relais?" ist also eigentlich zwei Fragen: wäre 30 s PWM für ein PCB-Relais realistisch (eher nicht) und für ein Mini-ISO-Relais (ja, problemlos).
2. KFZ-Relais im Detail – Schaltzeiten und Lebensdauer
Mechanische Schaltzeiten
| Relais-Typ | Anzugzeit | Abfallzeit | Min. Zykluszeit (mech.) |
|---|---|---|---|
| Songle SRD-05VDC-SL-C (PCB-Hobby) | ~10 ms | ~5 ms | ~30 ms (≈ 30 Hz) |
| Bosch Mini-ISO 30 A (z. B. 0 332 019 150) | 10–15 ms | 5–10 ms | ~25 ms |
| Hella 50 A SPDT (4RA-Serie) | 15–20 ms | 10 ms | ~35 ms |
| Tyco V23234 KFZ-Power | ~10 ms | ~3 ms | ~15 ms |
Mechanisch verkraften alle ein paar 10 Hz problemlos. Die elektrische Lebensdauer unter Last (Lichtbogen, Inrush) ist die echte Begrenzung.
Lebensdauer unter Lüfter-Last
Ein typischer KFZ-Kühlerventilator zieht:
- Dauerstrom 10–20 A (Manta B: vermutlich ~12–15 A)
- Anlaufstrom 3–6 × Dauer für 50–200 ms (sog. „Inrush")
- Abschaltspike wird von der Freilaufdiode über die Spule, NICHT über den Kontakt eingefangen — aber das Bordnetz sieht den Spike
| Relais | Datenblatt-Zyklen (induktive Last) | Bei 30 s Slow-PWM, 100 % Lüfter-Zeit | Realistisch (10 % Lüfter) |
|---|---|---|---|
| SRD-05VDC-SL-C @ 10 A | ~100 000 | ~830 h | ~14 Jahre* |
| Bosch Mini-ISO 30 A | ~200 000 | ~1 660 h | ~28 Jahre* |
| Hella 4RA / 50 A | ~200 000–500 000 | ~4 150 h | ~70 Jahre* |
* Annahme: 200 h Fahrt/Jahr, 10 % davon mit aktivem Lüfter. Real meist weniger; an heißen Tagen / Anhängerbetrieb kann's mehr sein.
Antwort auf deine Frage: 30 s PWM ist für ein echtes KFZ-Relais (Mini-ISO) absolut realistisch und harmlos. Selbst bei Worst-Case-Nutzung übertrifft die Lebensdauer den Rest des Fahrzeugs. Beim aktuell verbauten SRD-Hobby-Relais ist es grenzwertig — das ist eher ein Fall, wo das Relais sowieso nicht in ein 12 V/15 A KFZ-Bordnetz gehört.
3. Wo's trotzdem haken kann (auch beim KFZ-Relais)
- Hörbares Klicken — alle 30 s ein Schaltgeräusch. Im Motorraum egal, im Innenraum nervig.
- Lüfter-Bürstenverschleiß — viele Anläufe = mehr Bürstenverschleiß als kontinuierlicher Lauf.
- Bordnetz-Spikes — alle 30 s ein 30–80 A-Inrush-Spike auf 12 V. Lichtmaschine + Batterie puffern, aber Radio kann „klacken" hören.
- Kein Soft-Start — der Lüfter springt von 0 auf volle Drehzahl. Mit MOSFET kann man rampen.
- Keine Drehzahlregelung — Slow-PWM-Duty mittelt sich thermisch raus, der Motor läuft aber binär. Ein „45 % leise" gibt's nicht.
4. Die fünf Lösungswege im Vergleich
| Variante | Hardware-Aufwand | Software-Aufwand | Komfort | Lebensdauer | Mein Rating |
|---|---|---|---|---|---|
| A) Status Quo: SRD-Hobby + Slow-PWM 30 s | kein | kein | schlecht (Klick) | grenzwertig | vermeiden |
| B) Mini-ISO-KFZ-Relais + Slow-PWM 30 s | 1 Relais + Sockel | kein | mittel (Klick) | sehr gut | solide |
| C) Zwei-Stufen-Relais (Low / High) ohne PWM | 2 KFZ-Relais + 0,3 Ω/100 W Vorwiderstand für Low | klein (Output → 0/Low/High) | gut (3 Stufen) | sehr gut | elegant |
| D) Logik-MOSFET mit echter PWM (100 Hz–25 kHz) | 1 MOSFET + Gate-R + TVS | klein (analogWrite) | sehr gut (lautlos, Soft-Start, stufenlos) | quasi unbegrenzt | empfohlen |
| E) Hybrid: KFZ-Relais hält Dauerstrom, MOSFET schaltet | 1 Relais + 1 MOSFET | mittel (zwei Aktoren) | sehr gut | quasi unbegrenzt | overkill |
5. Empfehlungen je nach Strategie
Hinweis: aktuelle Projektentscheidung ist Variante B + D-dominante Hysterese (Punkt 0 oben). Die anderen Optionen bleiben hier als Referenz erhalten, falls die Strategie später wechselt.
SRD-PCB-Relais gegen Bosch Mini-ISO 30 A tauschen. Firmware mit
CFG_RELAY_MODE = RELAY_HYST_PID (Default in v2) flashen. Schaltrate sinkt von ~120/h auf ~10–30/h, Klicken nur noch alle paar Minuten, Lebensdauer „mehrere Auto-Leben" bei realistischer Nutzung. Kosten: ~5 €.
Logik-MOSFET IRLZ44N (TO-220, ~1 €), 25 kHz PWM, lautlos, stufenlos. Voraussetzung: Platinen-Revision oder Adapterboard, 100 Ω Gate-R, 10 kΩ Pulldown, TVS-Diode, Kühlkörper. Firmware mit
CFG_RELAY_MODE = RELAY_SLOW_PWM + PWM-Periode auf 40 µs (auf Timer1) → echtes PWM. Erst sinnvoll wenn das Klicken trotz Hysterese stört.
6. High-Level-Umsetzung — Aktuator-Abstraktion
Damit die Firmware nicht jedes Mal umgeschrieben werden muss, wenn die Hardware sich ändert, abstrahiere ich den „Aktuator" (Lüfter-Endstufe). Der PID-Regler liefert weiter eine Stellgröße 0–100 %. Welcher Aktuator-Code daraus „Relais an/aus" macht, ist auswählbar.
// firmware/ProMini_Optimized.ino – konzeptionell:
#define CFG_FAN_ACTUATOR ACTUATOR_SLOW_PWM_RELAY // A oder B
// ACTUATOR_TWO_STAGE_RELAY // C
// ACTUATOR_FAST_PWM_MOSFET // D
// ACTUATOR_HYBRID_RELAY_MOSFET // E
class FanActuator {
public:
virtual void apply(float dutyPct) = 0; // 0..100
virtual void off() = 0;
};
// A/B: Slow-PWM auf Relais (Default, schon implementiert)
class SlowPwmActuator : public FanActuator {
uint8_t pin; unsigned long cycleStart, cycleMs;
void apply(float duty) override {
unsigned long now = millis(), el = (now - cycleStart) % cycleMs;
digitalWrite(pin, (el < duty/100.0f * cycleMs) ? HIGH : LOW);
}
};
// C: Zwei-Stufen-Relais ohne PWM
class TwoStageActuator : public FanActuator {
uint8_t pinLow, pinHigh;
void apply(float duty) override {
if (duty < 30) { off(); }
else if (duty < 70) { digitalWrite(pinLow, HIGH); digitalWrite(pinHigh, LOW); }
else { digitalWrite(pinLow, LOW); digitalWrite(pinHigh, HIGH); }
}
};
// D: Echtes PWM auf MOSFET (Timer1, 25 kHz)
class FastPwmActuator : public FanActuator {
uint8_t pin;
void setup() {
// Timer1 in 8-Bit Fast-PWM bei 25 kHz konfigurieren
TCCR1A = _BV(COM1A1) | _BV(WGM10);
TCCR1B = _BV(WGM12) | _BV(CS10); // 16 MHz / 1 / 256 ≈ 62 kHz
}
void apply(float duty) override {
OCR1A = (uint8_t)(duty * 2.55f); // 0..255
}
};
// Verwendung im PID-Loop:
fanActuator->apply(manualOverride ? 100.0f : pidOutputPct);Die konkrete Klasse wird per #if-Schalter zur Compilezeit ausgewählt. Das Interface ist gleich, der Rest der Firmware (PID, Override, Auto-Ende) bleibt unverändert.
7. Schaltplan-Skizzen
Variante D – Logik-MOSFET (empfohlen)
+12 V (Bordnetz, abgesichert)
│
┌┴┐
│L│ Lüfter (12 V, 10–15 A)
└┬┘
│ ┌───── TVS 18 V (z. B. SMBJ18A)
├─────┤ oder Schottky-Freilaufdiode 1N5408
│ └───── parallel zur Lüfterwicklung
│
D ─┴─
│
ATmega A0 ───[100 Ω]─── G ──┤ IRLZ44N (TO-220, Kühlkörper)
│
S ─┬─
│
└─── GND (12 V- und µC-GND verbunden)
10 kΩ Gate-Pulldown von G nach S (verhindert Floating bei
Reset / Power-Up – wichtig, sonst zappelt der MOSFET).
Variante C – Zwei-Stufen-Relais
+12 V ──┬─── K1 (Low) ──[ 0,3 Ω / 100 W ]──┐
│ │
└─── K2 (High) ────────────────────────┤
├─── Lüfter ─── GND
│
1N5408 parallel zur
Lüfterwicklung
ATmega A0 → Treiber → K2 (High)
ATmega Aux → Treiber → K1 (Low)
PID-Output 0..30 % → beide AUS
PID-Output 30..70 % → K1 AN, K2 AUS (langsame Drehzahl)
PID-Output 70..100% → K1 AUS, K2 AN (volle Drehzahl)
Die Reihenschaltung über K1 + Vorwiderstand ist die klassische Werks-Lösung in den meisten KFZ. Im Manta B sollte vermutlich sogar bereits ein zweiter Schaltpunkt im Originalkabelbaum existieren.
8. Migrations-Roadmap
| Schritt | Was | Wer | Aufwand |
|---|---|---|---|
| 1 | Aktuelle Firmware mit PID-Slow-PWM 30 s flashen, im Auto messen: Schaltgeräusch hörbar? Bordnetz-Klacken im Radio? | du | 1 h |
| 2a | Wenn Relais-Klacken stört oder Lebensdauer-Sorge → SRD-PCB-Relais gegen Bosch Mini-ISO 30 A tauschen (Adapterboard mit Sockel) | du | 2–3 h Lötzeit |
| 2b | Empfehlung: gleich auf MOSFET-Variante wechseln. Adapterplatine mit IRLZ44N, Gate-R, Pulldown, TVS | du / KiCad | 1 Wochenende |
| 3 | Firmware-Aktuator-Abstraktion einführen, FastPwmActuator implementieren (Timer1 25 kHz) | ich, auf Bestellung | ~1 h Code |
| 4 | Im Emulator auch FastPWM darstellen (PWM-Periode 1 s im Sim, dafür sichtbar) | ich | 30 min |
| 5 | PID-Tuning auf der echten Hardware: Sprung-Antwort messen, Kp/Ki/Kd nachjustieren | du, mit Datenlog | iterativ |
9. Was ich davon jetzt sofort tun kann
- Sag „Aktuator-Abstraktion bauen" → ich lege die Klassen wie oben in der Firmware an, baue alle drei Strategien (Slow-PWM, Two-Stage, Fast-PWM) ein und mache sie über
CFG_FAN_ACTUATORwählbar. - Sag „Schaltplan-Erweiterung in KiCad" → ich kann zwar KiCad nicht direkt aufrufen (nicht installiert), aber ich kann eine ergänzende SVG-Skizze als zweite Schaltplan-Datei erstellen.
- Sag „BOM für Variante D" → ich erstelle eine fertige Bestellliste mit Reichelt-/Mouser-Bestellnummern.